Tower Takeover Drive Base
For the 2019 Vex season Tower Takeover we decided to built a Tray Bot wich has a Arm to lift the cubes into the towers and a tray wich holds them so we can make a stack.
For our drive base we originally planned to make a small manouverable bot with c-25’s long by c-30’s wide and a anti tip stabalizer at the rear. Here is a photo of the original base.

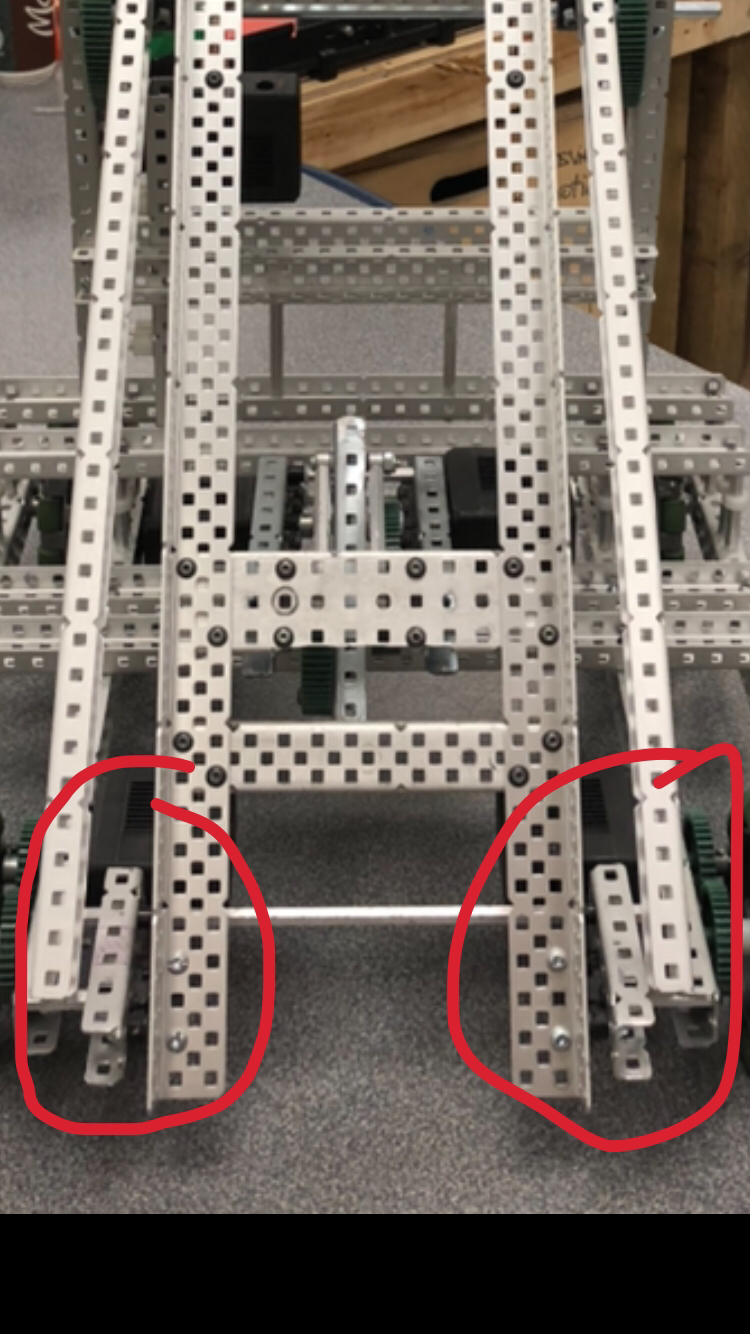
Here is a photo of the passive stabalizer that flips down and lock into place.

After several tests we ran into issues with the weight distribution, we had so much weight reling on the stabalizer that the front wheel were lifted off the ground and were not contacting the cround so we opted for a different design. The reason for this is when the wheels dont touch we have a loss in power because the front motors wich are attached to the wheels are basically not doing anything.
After discovering this we opted for a longer drive base and moving the arm farther forward on the base ( c-30’s long) wich pushes the center of gravity more towards the middle of the robot.

This change in dessign solved all our drive base issues and now the robot is stable and all four motors are getting optimal use. We have four c-30’s running across the robot acting as suports, we also added a stand off in the front to prevent twisting and bending when the weight of the cubes is applied.

For our gear train we ran a 1-1 ratio in both the front and rear of the drive base. We decided to do this because the V5 motors have plenty of tourque and speed without either gearing up or down the motors. In the 2019 season speed is less of a factor rather than being able to have more control over the drive base and manouvering around the cubes to intake the colours we are focusing during the match.
For the fromt of the robot we used 36T gears with a 1-1 ratio so that would could move the motors towards the middle of the base increasing stability and also leaving plenty of space for our tray.

For future improvements we plan to use mechanum wheels wich will allow us to straphe during matches. The reason we want to be able to straphe is for auton, it will allow us to have a higher scoring auton by picking up one line of cubes then strapheing to the next line and placing it into the scoring zone without having to turn the robot.
After building the mechanum wheel drive base we ran into issues with weight distribution, this casued the robot to drift rather than straphe perfectly on its x-axis. We decided to swap the drive base back to omni wheels for the competition this weekend but plan to swap back to mechanum wheels for future competitions. The reason for this is because straphing gives us a large advantage in auto and allows us to stack more cubes within the 15s auton period.
Here are some photos of our drive base.

When re designing the new drive base we thought about how to improve the stability of the tray mount, we decided the best option for this would be to shorten the distance between the wheels and add a c-10 on the front sticking out, this allowed us to mount the tray directly to the frame of the drive base rather than having a c-chanel mounted inward with stand offs for spacing. After making this change wedidn'trun into any issues with stability.
origional mount.
Re designed mount.

We had some issues with straphing, when we tired to straphe istead the robot would “drift on its x-axis” rather than move perfectly horizontally on its x-axis. We originally thought that the issue was the weight displacement causing the robot to move faster in the front that the rear because of there being more weight thus resulting in the wheels contacting the ground better. We soon discovered that it was a simple coding error and we were able to solve the issue.
For the future we plan to keep the drive base we have right now because we havent had any issues with it and it allowes us to straphe.
