Drive Base
For our origional drive base we decided to build a six motor drive with three motors mounted in the middle of the base, geared togeather with a 1:1 ratio then chained to our wheels. We ran into problems at the competition due to the drive base being overpowered by the new V.5 system. We also ran into a few ussue with over heating
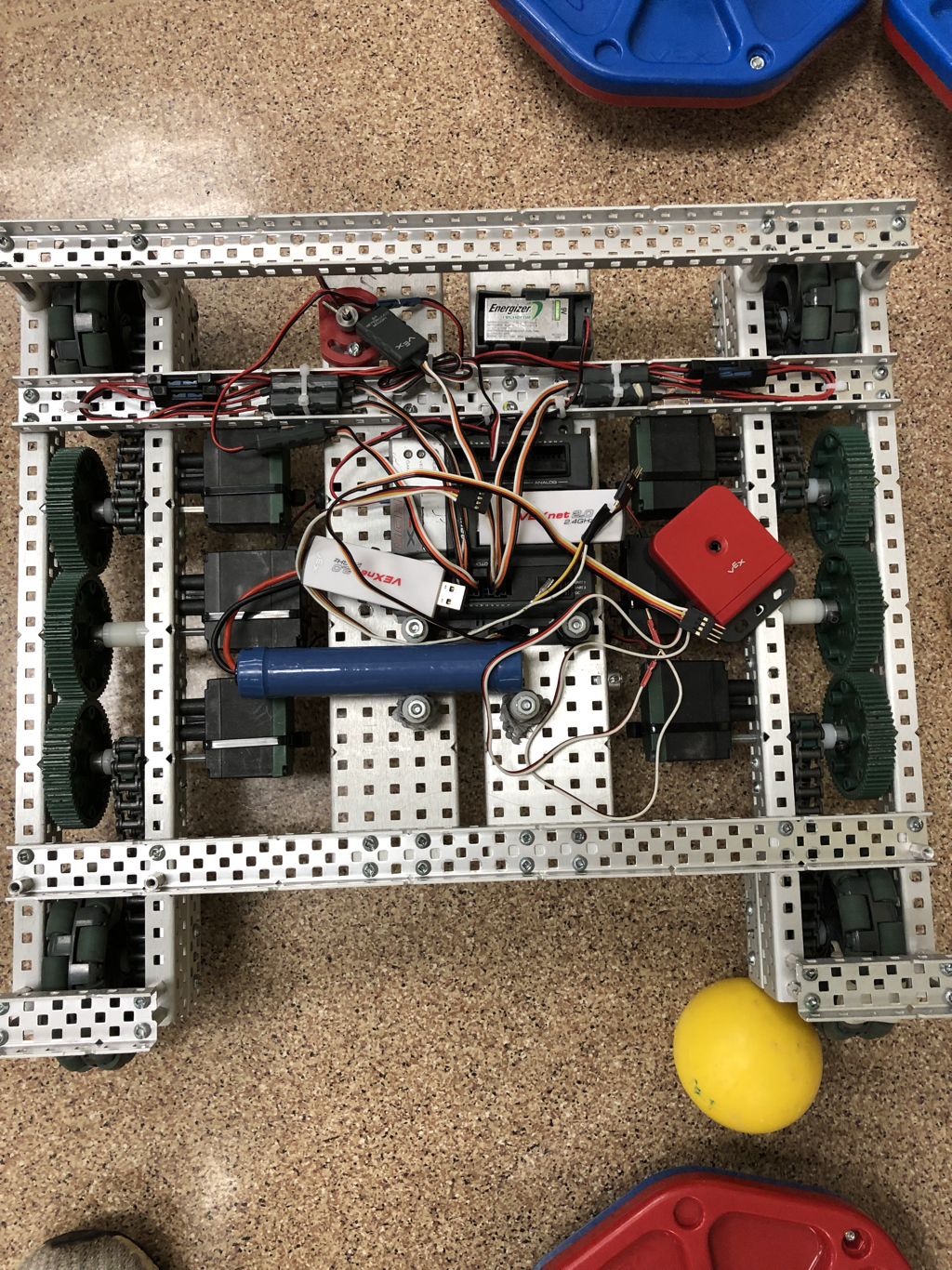

for this base we also used the black incoder motors for programing autonomous, in the future we plan to swap our the i.d.e’s for the shaft incoders because we read on a few fex forums that the i.e.d’s can cause issues in code.
For our newest drive base we decided to build a 6motor drive base with a motor on each wheel because with all the gearing on the last base we ran into issues with friction. For this new base we are trying a smaller and more compact design so we built a 25x25 long base with six wheels, we have omni wheels on each corner and one regular wheel in the middle on each side.


We are using the V.4 platform in this bot and we are planning to run the turbo gearing in them. In the futur we will mostlikely swap these motors out for four V.5’s.
