Tower Takeover Arm Prototype 1
For the Vex 2019 Season Tower Takeover we decided to build a “Tray Bot” wich is one of the more common designs this season. The main focus of our design is to intake cubes from the front of the robot using roller, to form a stack of cubes wich we would place in our designated scoring zone. To compliment the stacking capabilities of our bot we decided to incorporate an arm into the design. The arm would allow us to score cubes in the towers located around the feild.
For our very first design we built a highly over complicated 2-Bar arm design. We had the motor mounted in the center of the arm conected to the arm bars using 2 chains and many gears.
Here are some photos of our initial design.


After a couple of tests we quickly discovered that the arm was lacking tourque and stability. We then decided that the best option would be to re-design the entire arm. We started by changing the gear ratio from a 5-1 ratio to a 7-1 ratio. The reasons for this are so that there is less strain on the single motor powering the arm, and also allowing us to build larger rollers if needed and still be able to lift the arm with the extra weight.
After changing the gear ratio we decided to try to simplify the arm design, we decided to have a single C-channel suporting the left side of the arm while we had 2 C-channels suporting the right side of the arm also allowing us to built the gear train on the second c-channel. To help stabalize the arm we ran a high strength axle the through the 84T gears on either side of the arm. This helped to keep either side of the arm level when lifting the weight of the cube and rollers. Although we added the high strength axle, we still had issues keeping both sides of the arm parallel to eachother when lifting the weight. To solve this problem we mounted a C-1x3x17 on both the rop and bottom of the arm and then connected the two together using standoffs, this creates a box shape to the arm not allowing it to flex. After making these adjustments we were happy with the results and kept the arm design for the first competition.
After changing the gear ratio we decided to try to simplify the arm design, we decided to have a single C-channel suporting the left side of the arm while we had 2 C-channels suporting the right side of the arm also allowing us to built the gear train on the second c-channel. To help stabalize the arm we ran a high strength axle the through the 84T gears on either side of the arm. This helped to keep either side of the arm level when lifting the weight of the cube and rollers. Although we added the high strength axle, we still had issues keeping both sides of the arm parallel to eachother when lifting the weight. To solve this problem we mounted a C-1x3x17 on both the rop and bottom of the arm and then connected the two together using standoffs, this creates a box shape to the arm not allowing it to flex. After making these adjustments we were happy with the results and kept the arm design for the first competition.

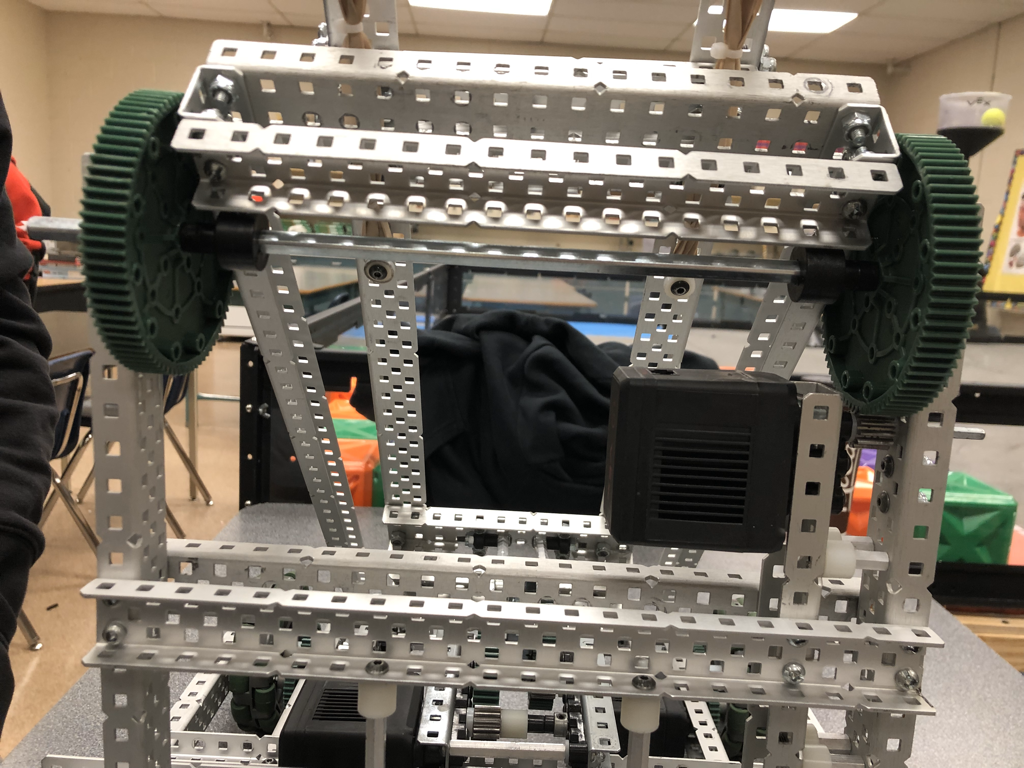
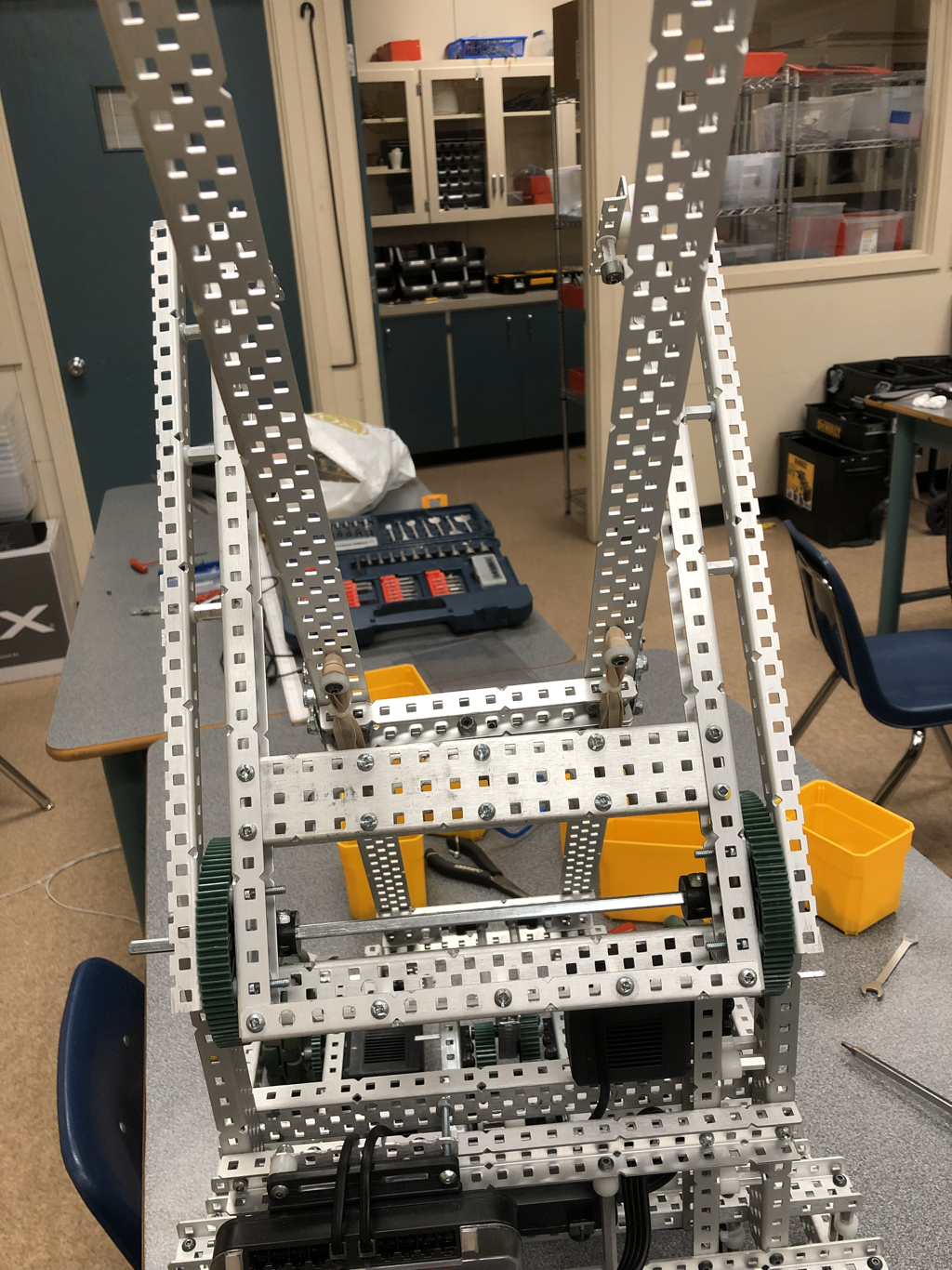
After the first competition at Enver Creek Secondary I decided to split off from the group and design my own robot. I had a few key ideas in mind for my built, one of thoese ideas being the arm design. I wanted to build a four-bar design featuring a triangular elastic design allowing the arm to be able to lift heavier loads more efficiently and in a more linear fation. With this design it was built on a 4 motor mechanum wheel drive base, to help the base with stability and tipping issues i decided to move the arm infront of the rear wheels shifting the centre of gravity more towards the middle of the robot. For the actual four-bar design i chose to space the vertical bars 11 holes apart on the c-25 allowing the arm to have plenty of space for the elastic design. The arm is powered by a single motor geared up 5-1 becuase we ran out of 84T gears, i planned to change this ratio in the near future once we ordered in new parts.
Here are some photos of the arm during the build process.





Here is a video of our arm scoring a cube in the high tower.
