For our drag car we decided to build a robot with a closed wheels design to help with aerodynamics. For our gear ratio we went with a 9-1 ratio thus resulting in a fairly competitive robot. In the future if we ever do this project again i would change a few things like less weight, a higher gear ration, and use the max limit of motors. I don't have any videos of our robot but we did compete against Brendan Lightfoot's robot in a race from one end of the hall to the other and beat them by a bit more than a classrooms length.

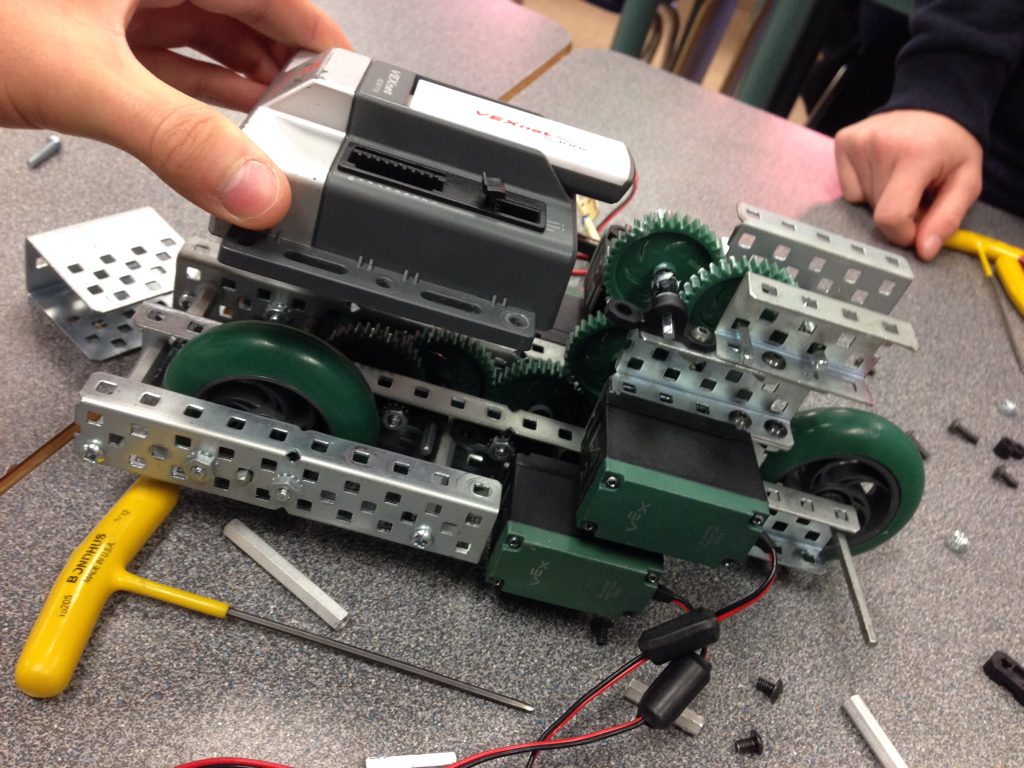
After testing our robot with a two wheel drive system we decided we would like to try to gain more traction by making it all wheel drive, to do so our plan was to make a simple chain from the back axle to the front wheels but we had no space on the rear axle for the sprocket. Our solution to this problem was to build an overly complicated gear train to the front wheels, the solution ended up creating lots of friction


After building our all wheel drive system we finnal were able to moubt up the micro controller and battery.
at the end of the day we had a drag car ended up being the second or third fastest in the class and a very fun project to build.
