Final Robot Term 2
This year the game is called Turning Point, the stacking aspect in this game is to score caps on the posts with your alliances colour and to also score flags by shooting balls to switch them to your teams colour. last year we used a double reverse four-bar to stack cones, we tried using a similar design at the start of this season. Eventually we swapped this design for a back-flip arm, with our arm we have a passive claw to pick up the caps and it works very consistently. To line up the arm with the post we have a cut c-1x3x20, with our guide we just have to back into the pole and then lift the arm to place the cap on the post. One disadvantage to our back-flip arm is that we don't have the height to score on the high post.

This is out origional dessign, we have a double reverse four bar around our fly wheel. This design needed 2 393 motors to lift with a ton of elastics to be able to stack the caps, we ran into over heating problems due to the older motors being under powered compared to the new V.5 motors. This year was the our first time building ball shooters, other games in the past such as “Nothing But Net” have incorporated this aspect but this was the year before i joined the club.

For our 3rd dessign we decided to build a smaller base for our robot because the previous robot had issues parking on the platfor due to the width. We also tried the same arm dessign on our 3rd version, we built a smaller double reverse four-bar, and had it of to one side of the robot instead of around the robot, we had to do this to fit our new ball launcher. We decided to swap out the flywheel wich is a more comon design and try something a little different. Our first attempt at a catapolt on the one side of the robot was not very successful. The reasons for this are one, we weren’t quite sure how to build it since it was our first time and ran into problems with gearing and elastic placement, and two, we still didn’t have the new V.5 kit wich lead to the need for more 393 motors on the catapult.
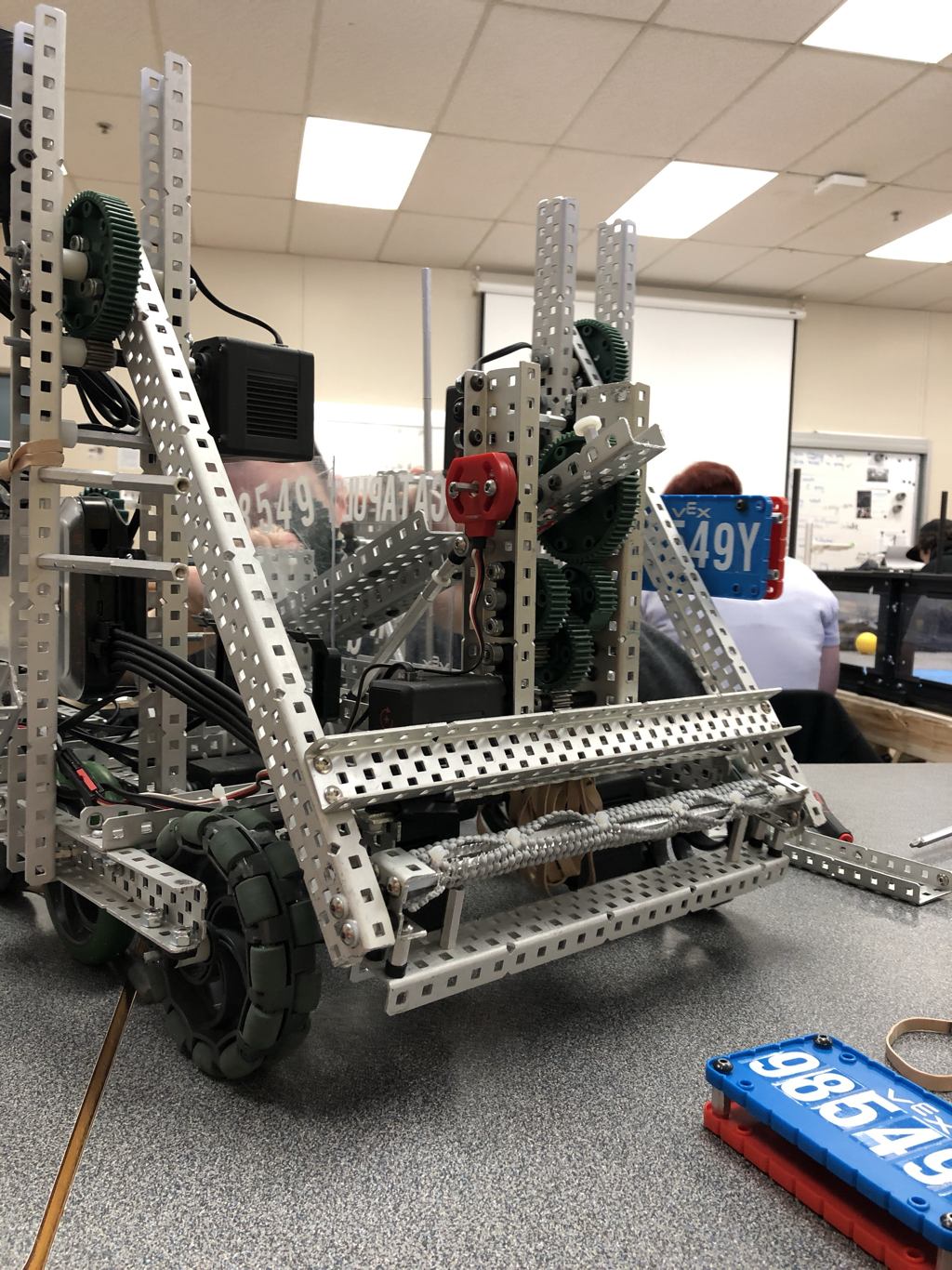

This is our current design, the back-flip arm right now we have no issues with it and we plan to save the design for BCIT.

For our ball launcher we decided to keep the catapult and rebuild it with the V.5 motors, we also designed the launcher to shoot two balls at once. We have a 18-1 gear ratio to power our catapult, we use 8-7 elastics. We have isues with stopping our catapult from bending because of the amount of force it creates when shooting the balls, We have a bunch of standoffs and c chanels supporting our catapult currency and is helping a bit with the bending.


Here is a video of our Auton.
BCIT Competition 2019
By the end of the year we had our robot perfected for the BCIT competition, and placed 1st in the B devision wile allianced with another burnsview team 98549X. Our team also took home the Build award and Amaze award. It was a great ending to our 2019 season and we look forward to next year.
Plans For Next Year
Next year we are planning to go to as many competitions as possible because its my teams last year and an increased budget would be a great help for our club since it is difficult for us to find sponsors and we are very grateful for the ones we have supporting our club.
