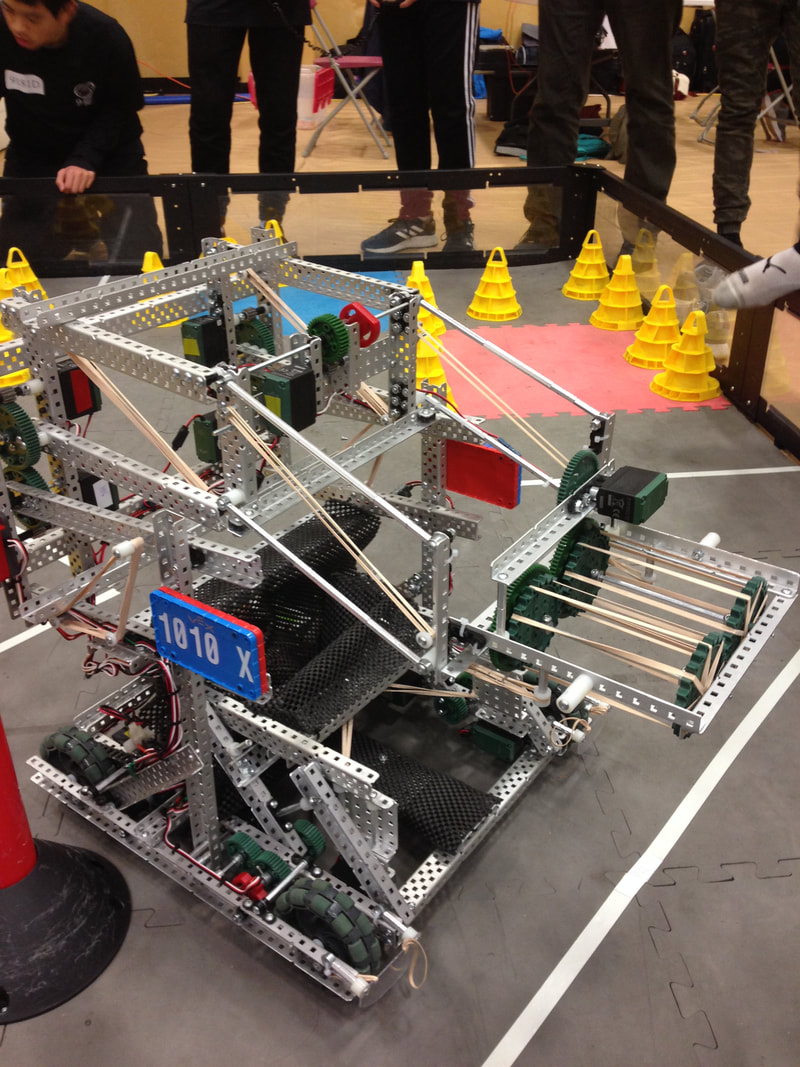
For our design we decided to build a double reverse four bar with a chain claw so we could stack on ourselves, we had a simple design for our mobile goal intake due to the lack of space on the base, we used rack and pinion and it surprisingly worked pretty well and consistent but we couldn't score in the 20 point zone.






For our arm we had to take a motor off of the double reverse four bar so we could use two motors for the chain bar, doing this caused a lack of power on the double reverse four bar because it was limited to three motors. For our claw we just built a simple one that grabs the cones from the side, front or back. For our competition robot V3 we are planning to use a passive intake claw like the one on 1010Z. The reasons why we are planning to make a passive intake is because they can pick cones up from the top and this makes stacking using the platforms a lot more efficient.
Our Claw




Roller Intake Claw

Our complete reverse four bar used four c1x2x35's nine c1x2x25's and four c1x2x10's. Our arm ended up being too heavy and the spacing could use some work and also the whole lift system could be simplified. For our V3 robot we are planning to simplify our reverse four-bar and we are also planning to build a mini four bar instead of a chain bar. We find that the mini four bar will be more stable than the chain-bar.