Step 1.
Find parts:
Vex motor x1
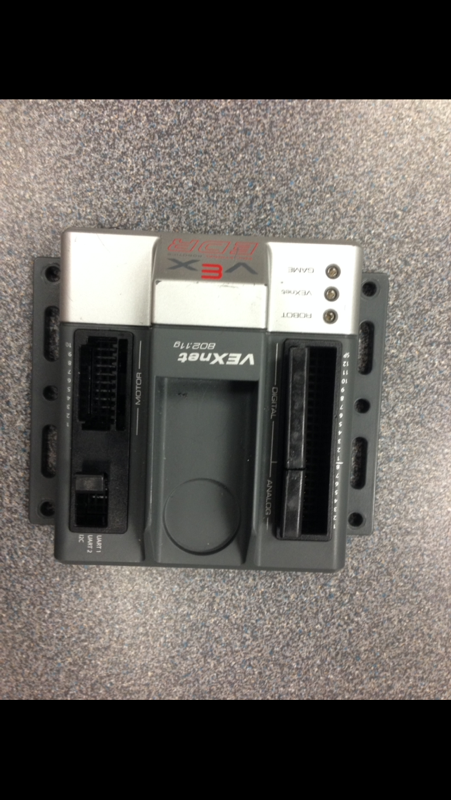
Vex Micro controller x1
Vex Battery x1
3" shaft x1
Shaft collar x1
L spacer x1
Omni wheel x1
Programing cable x1
Find parts:
Vex motor x1
Vex Micro controller x1
Vex Battery x1
3" shaft x1
Shaft collar x1
L spacer x1
Omni wheel x1
Programing cable x1
Step 2.
Put collar and spacer on shaft.
Put collar and spacer on shaft.

Step 3.
Insert shaft into motor.
Insert shaft into motor.

Step 4.
Add wheel to shaft.
Add wheel to shaft.

Step 5.
Plug motor into port 1 (without motor controller).
Plug motor into port 1 (without motor controller).

Step 6.
Plug programing cable into computer and micro controller.
Plug programing cable into computer and micro controller.




Step 7.
Download code.
Download code.
